僆乕僩僷僀儘僢僩偑岠偐側偔側偭偨
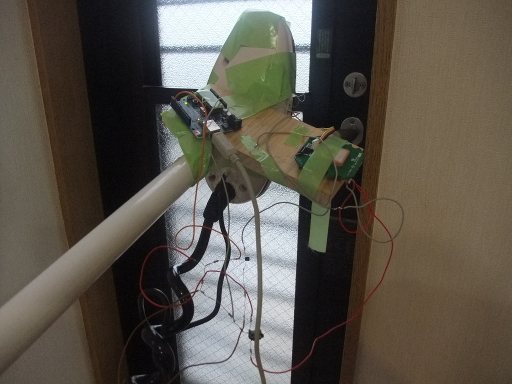
僆乕僩僷僀儘僢僩偲僗億僢僩儘僢僋偑岠偐側偔側偭偨丅儃僞儞傪墴偡偲僗僥傾儕儞僌儌乕僞乕偑偔傞偔傞夞偭偰偟傑偆丅儅僯儏傾儖偱偼憖嶌壜擻丅
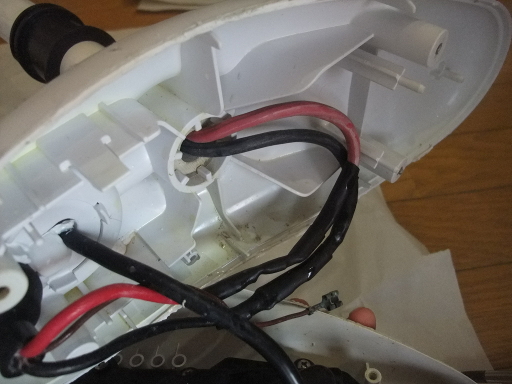 | 拞傪奐偗傞偲墿怓偄塼懱偑弌偰偒偨丅僔乕儖偟偰偁傞偐傜奀悈偱偼側偄偲巚偆偑丅寢業偟偨偺偐側丅 |
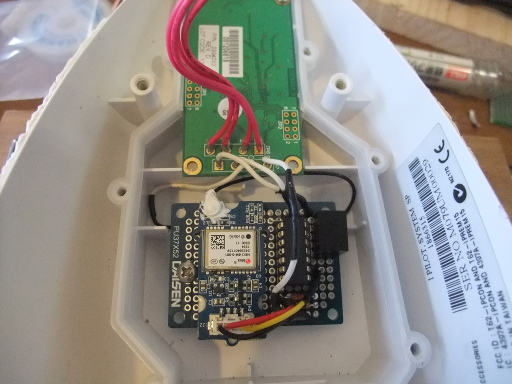
 | 偝傜偵崟偄儃僢僋僗傪奐偗傞丅幨恀嵍偑GPS儃乕僪偱塃偑僐儞僷僗丒壛懍搙僙儞僒乕儃乕僪丅偙傟傜偺儃乕僪偑4杮偺働乕僽儖偵傛偭偰ipilot儅僓乕儃乕僪偵愙懕偝傟偰偄傞丅偙偙偵塼懱偺怤擖偼側偐偭偨丅 |
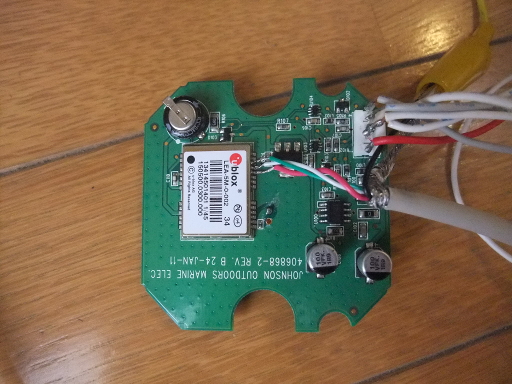 | GPS儃乕僪偑婡擻偟偰偄傞偐偳偆偐偺妋擣丅僐僱僋僞乕偺僺儞傾僒僀儞傪挷傋偰Arduino傪偮側偄偱傒傞丅偁傜備傞Baud rate傪帋偡偑暥帤壔偗丅捈愙PC偲USB宱桼偱偮側偖偲應埵偱偒偨丅偟偐偟偟偽傜偔偡傞偲儃乕僪偐傜偺怣崋偑搑愨偊傞丅GPS儗僔乕僶u-blox LEA-5偺僨乕僞僔乕僩傪尒傞偲USB偺嫙媼揹埑偼嵟戝3.8V丅USB偼5V偩偲巚偭偰5V偄傟偰偟傑偭偨偺偑椙偔側偐偭偨偐丅僨乕僞僔乕僩偼傛偔撉傔偲偄偆偙偲丅曌嫮偵側傝傑偟偨丅偙偺帪揰偱GPS儃乕僪偑婡擻偟偰偄傞偐偳偆偐偼専摙偱偒側偔側偭偰偟傑偭偨丅偟偐偟側偑傜捠怣僾儘僩僐儖偼NMEA0183丄Baud rate偼4800bps偲敾柧偟偨丅 |
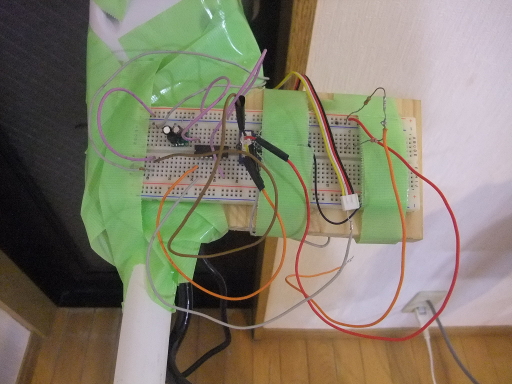
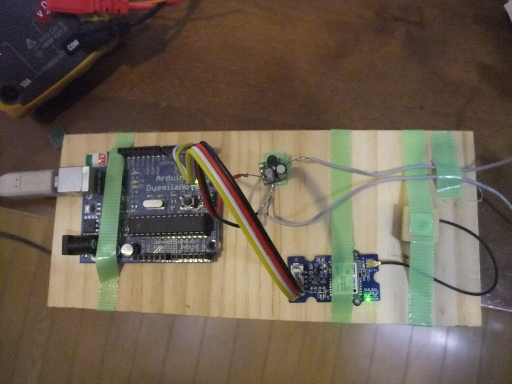 | Grove GPS傪攦偭偰偒偨乮塃壓乯丅Baud rate偼僨傿僼僅儖僩偱9600bps側偺偱4800bps偵棊偲偡昁梫偑偁傞丅偙偺愝掕偼昞柺幚憰偺儌僕儏乕儖偺15斣僺儞傪僆乕僾儞偵偡傞丅僺儞偵晅偄偰偄傞偼傫偩傪媧偄庢傞偑擄偟偄丅側傫偲偐僴儞僟偑偲傟偰4800bps偱捠怣偱偒偨丅GPS應埵偺寢壥偼Arduino偺僔儕傾儖儌僯僞偱傕傢偐傞偑u-blox偺昡壙梡偺僜僼僩僂僃傾u-center偱尒傞偲妝偟偄丅嵍偼Arduino丄拞墰偺彫偝偄婎斅偼12仺5V偺儗僊儏儗乕僞丅 |
 | 儈儞僐僞傪僀働傾偺媟棫偵屌掕丅揹尮偵偼幵偐傜偼偢偟偨僶僢僥儕乕傪梡堄偟偨丅 |
 | 僿僢僪晹偼梴惗僥乕僾偱壖屌掕丅僆儕僕僫儖偺儃乕僪偼揹尮晹傪廋棟偡傞偲嵞傃怣崋傪弌偡傛偆偵側偭偨偺偱庢傝晅偗偰傒偨丅arduino偱庴怣偡傞偑傗偭傁傝暥帤壔偗丅儃乕僪偐傜夞楬恾傪婲偙偟偰傒傞偲壜擻惈偺偁傞2偮偺尨場偑敾柧偟偨丅
丒GPS偲儈儞僐僞偺捠怣偼3.3V丅arduino偱撉傒庢傞偵偼5V偵偡傞昁梫偑偁傞丅
丒GPS儗僔乕僶偺弌椡偼僀儞僶乕僞偵傛偭偰斀揮偝傟偰偄傞丅
僀儞僶乕僞傪僶僀僷僗偟偰5V偵曄姺偡傞夞楬傪慻傒丄arduino偵愙懕偡傞偲應埵偱偒偨丅偟偐偟側偑傜昞帵偝傟偨尰嵼抧偼300m埲忋棧傟偨廧戭抧丅儃乕僪傪儈儞僐僞偵栠偟偰傒傞偲傗偭傁傝僗僥傾儕儞僌偑夞偭偰偟傑偄丄嵟崅夞揮偵側傞丅堏摦偟偰偄側偄偺偵懍搙昞帵偑1僲僢僩埲忋偱傞偙偲傕偁偭偰晄埨掕丅傗偭傁傝尨場偼GPS儃乕僪側偺偐傕偟傟側偄丅
儈儞僐僞偐傜GPS儃乕僪傊偼壗傕憲怣偝傟偰偄側偄偙偲傕傢偐偭偨丅 |
 | Grove GPS偵栠偡丅僽儗僢僪儃乕僪傪弌偟偰偒偰丄庤帩偪偺僀儞僶乕僞74HC04偱Grove GPS偐傜偺怣崋傪斀揮偝偣傞丅僀儞僶乕僞乕偐傜偺弌椡揹埑偑側偤偐3V偖傜偄側偺偱偦偺傑傑儈儞僐僞偵愙懕丅 |
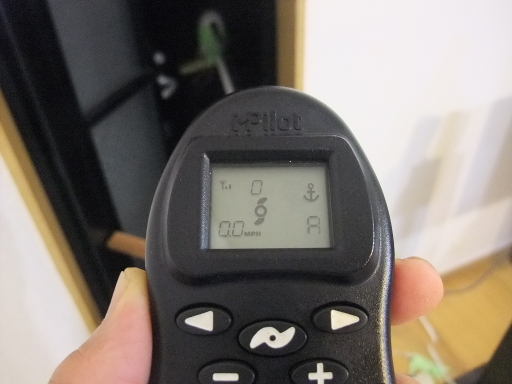 | 彑庤岥偐傜僿僢僪傪弌偟偰偟偽傜偔偡傞偲GPS怣崋庴怣傪帵偡僶乕偑昞帵偝傟偨丅僗億僢僩儘僢僋傕偱偒偨丅堏摦懍搙傕0.0偐傜0.1僲僢僩偱埨掕偟偰偄傞丅 |
 | 嫃娫偱偺嶌嬈晽宨丅壠懓偼偙偺傛偆側偙偲偵堦墳棟夝偑偁傞丅偪側傒偵偙偺婘偼怘戩偲偟偰巊偭偰偄傞丅 |
 | 儐僯僶乕僒儖婎斅偵5V弌椡偺DC-DC僐儞僶乕僞偲僀儞僶乕僞74HC04丄偦傟偲儗儀儖傪棊偲偡偨傔偺掞峈傪慻傒崬傓丅Grove GPS偼椉柺僥乕僾偱婎斅偵揬傝晅偗傞丅GPS傾儞僥僫偼鉃懱偵僶僗僐乕僋偱屌掕偟偨丅74HC04偼俇夞楬偩偑巊梡偟偰偄傞偺偼侾夞楬丅枹巊梡擖椡僺儞偼偡傋偰僌儔儞僪偵棊偲偡丅 |
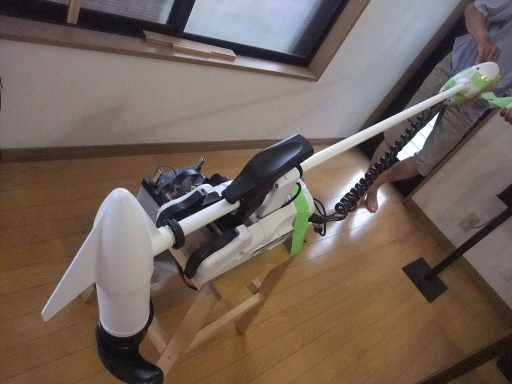
 | 姰惉昳傪僼傿乕儖僪僥僗僩丅寱嶈偺慏抍偱儚儔僒掁傝丅GPS庴怣傕椙岲偱傾僪僶儞僗僪僆乕僩僷僀儘僢僩偼惓忢偵嶌摦偡傞傛偆偵側偭偨丅 |